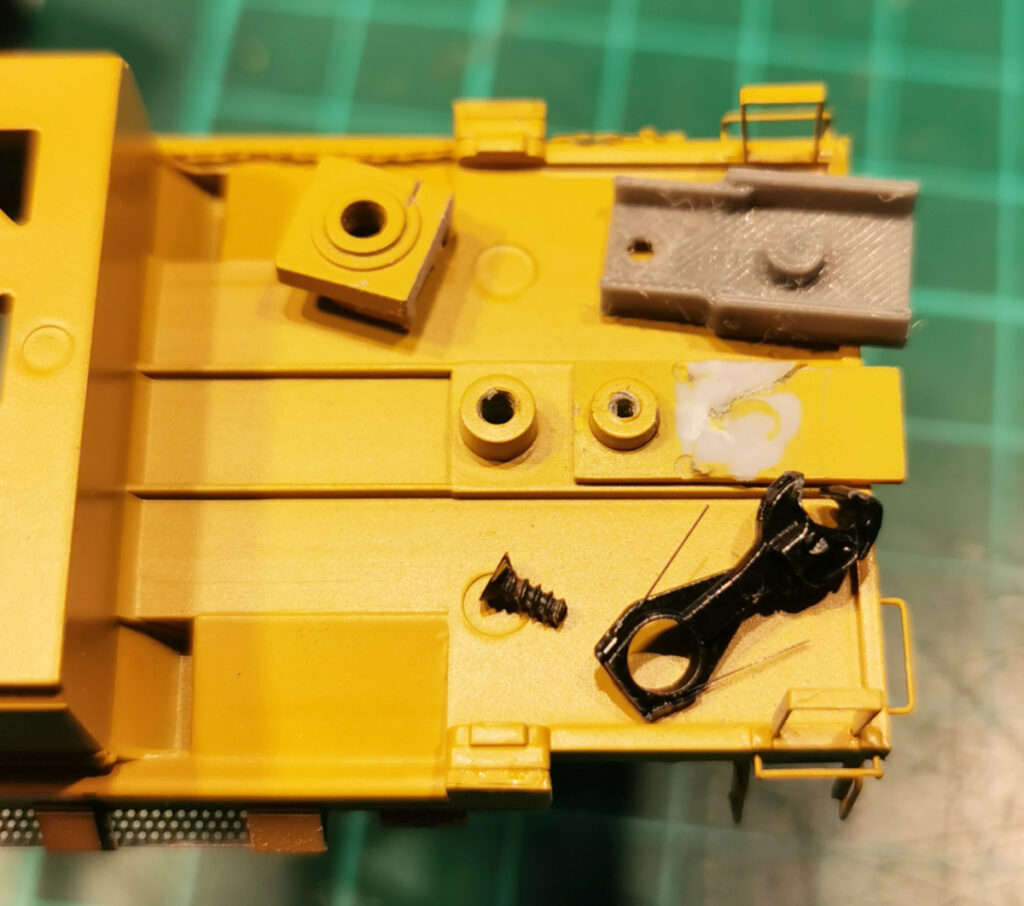
Altas verwendet bei vielen neueren Modellen Accumate Kunststoffkupplungen. Diese sind sehr fein, funktionieren aber leider genauso schlecht wie alle Kunststoffkupplungen ohne echte Spiralfeder und bringen einen immer wieder Schadzettel „Sche… Plastikkupplungen“ ein. Leider ist es nicht mit einem einfachen Tausch gegen Kadee 158 getan, da der Schacht für die Wisker-Kupplung zu schmal ist. Außerdem bauen die Accumate-Kupplungen sehr kurz.
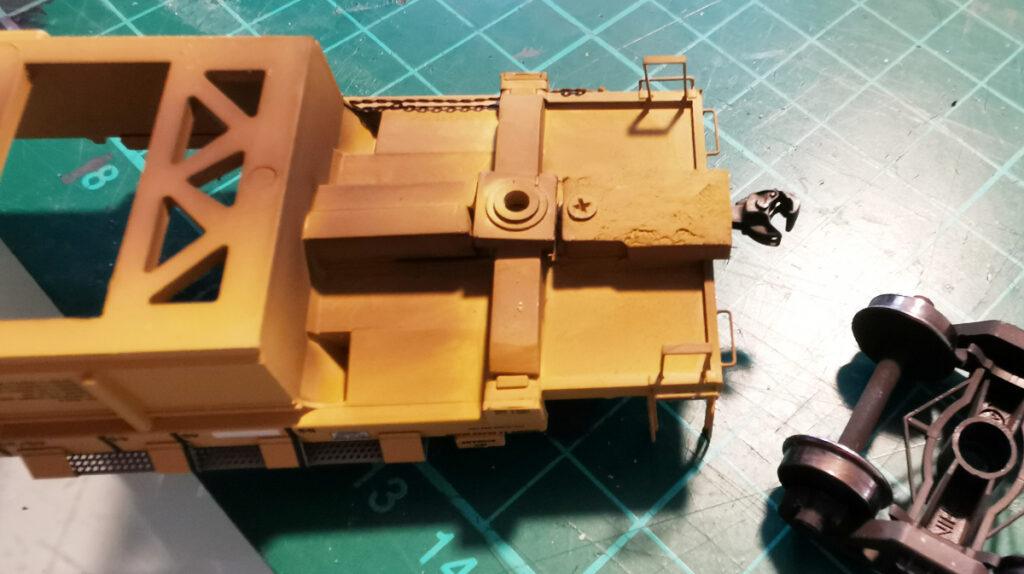
Neue Kupplung für Atlas Thrall 53′ Articulated Well Car Ein wunderschönes Atlas-Modell mit geätzten Laufstegen – aber mit zwei Problemstellen. Das Wagengewicht und die Kupplungen. Ich habe eine neue Abdeckung des Kuppelschachts gezeichnet und 3D gedruckt. Dabei hat es sich herausgestellt, das Resin-Druck gar nicht notwendig war sondern Filament (Bambu A1 Mini) mit 0,2er-Düse super funktioniert hat.
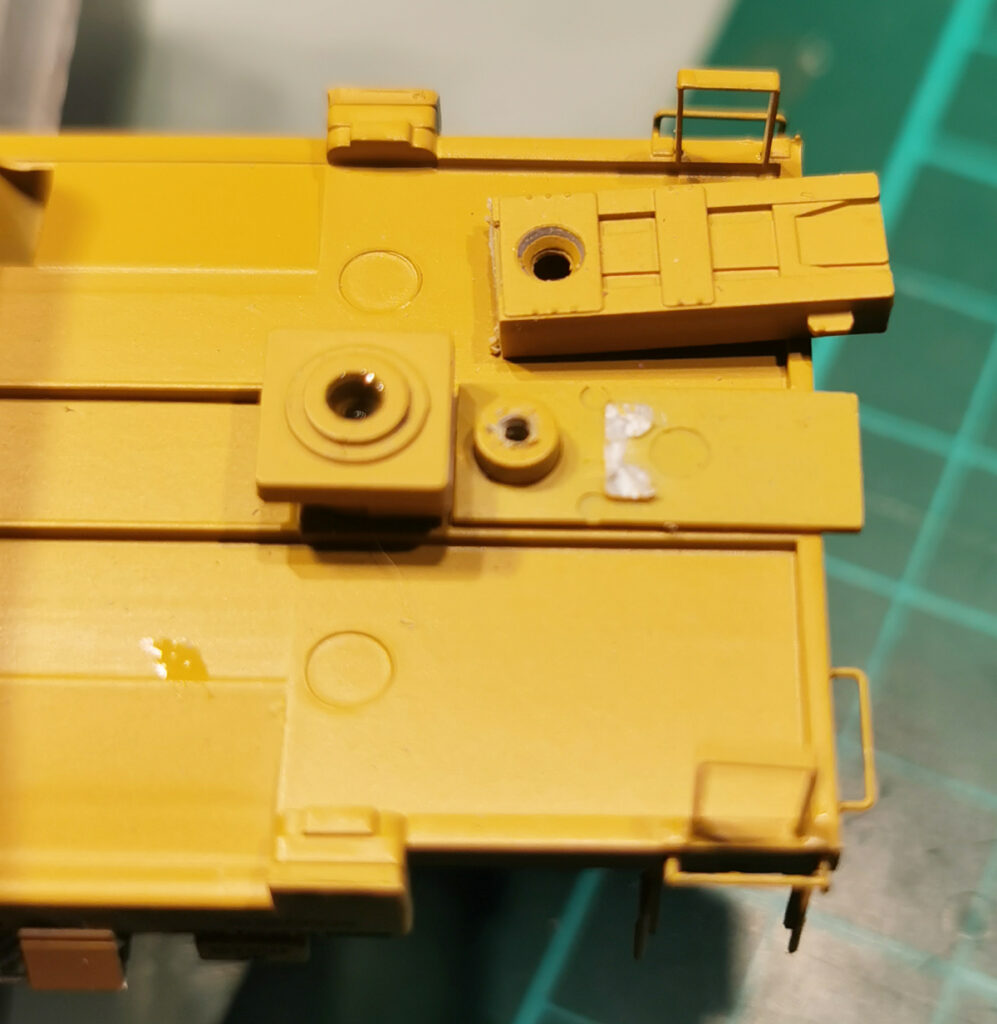
Die alte Abdeckung wird zwischen Drehzapfen (der wird original weiterverwendet) und der Kuppelschachtabdeckung durchgesägt und die hinteren Anschlagzapfen für die Accumate-Kupplug abgezwickt .
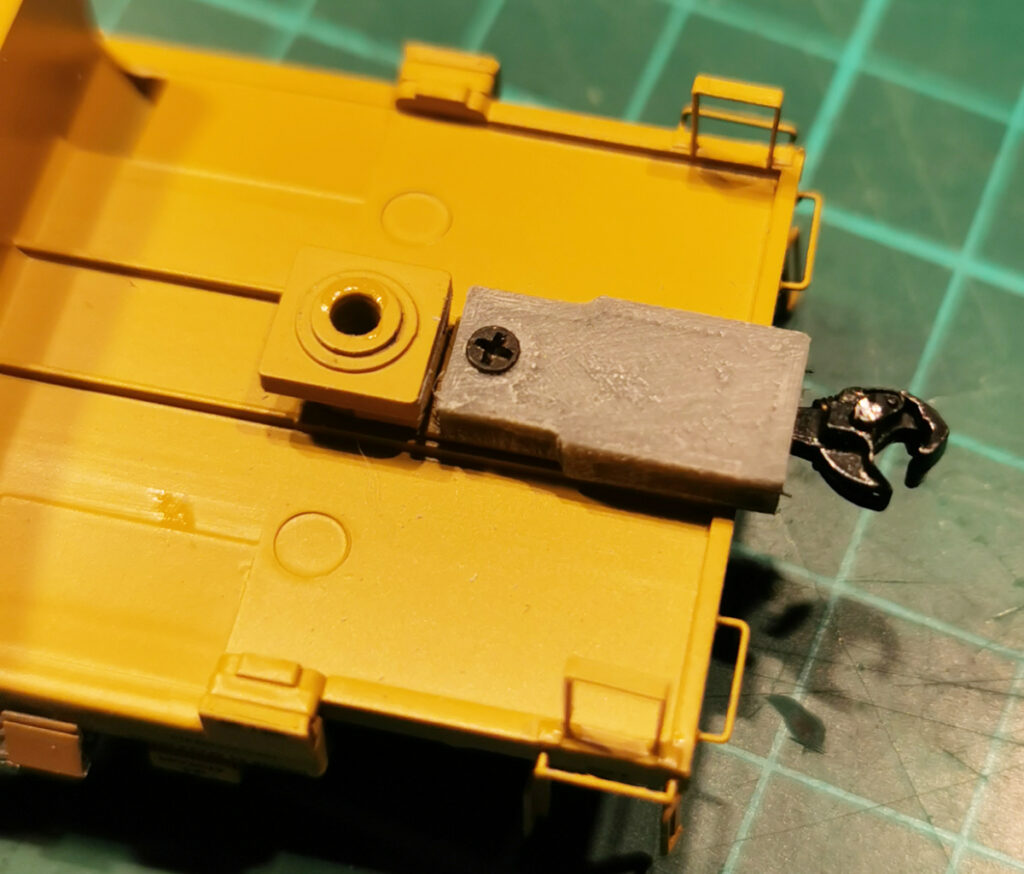
Ich habe die kurze Version der Kadee 153 Short verwendet. Das Muster ist in grau gedruckt (sieht man dann auch besser auf den Fotos).
Übrigens: Bei dem Wagen passen die Kadee 442 als Brake-Pads.
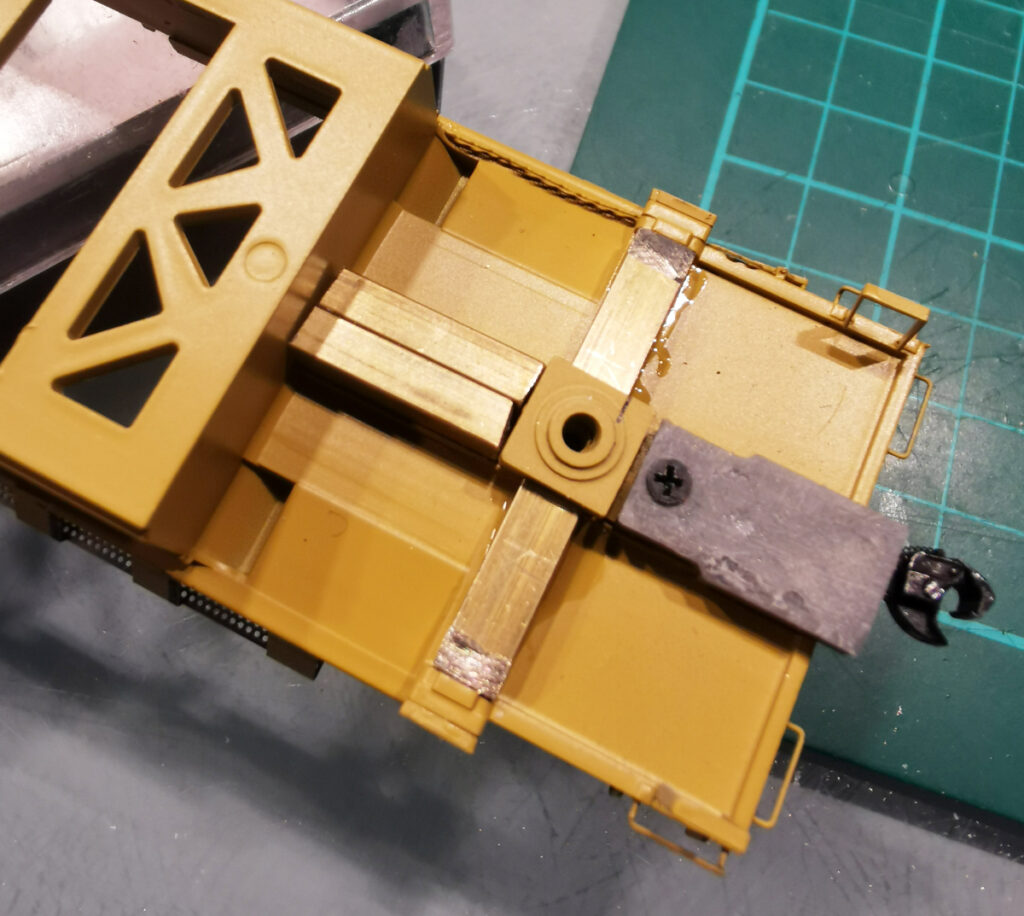
Satte 36g (oder anders formuliert – nix) wiegt ein Wagenteil mit 2 Trucks. Beladen sicherlich keine Thema aber leer in Zugmitte?
Ich habe versucht mit Messingprofilen, die ich noch herumliegen hatte, etwas mehr Gewicht in den Wagen zu bekommen. So „richtig“ schwer sind sie auch nicht geworden, aber doch ein bisschen mehr.
Wer sich nicht mit der Weboberfläche der WiFred-Software herumschlagen möchte, kann auf seiner FREDI-Karten einen QR-Code platzieren, mit dem man sehr einfach eine Lokadresse dem Schieberegler 1 zuweisen kann.
Wie man den QR-Code selbst erstellt steht unten auf dieser Seite
Vorgehenweise:
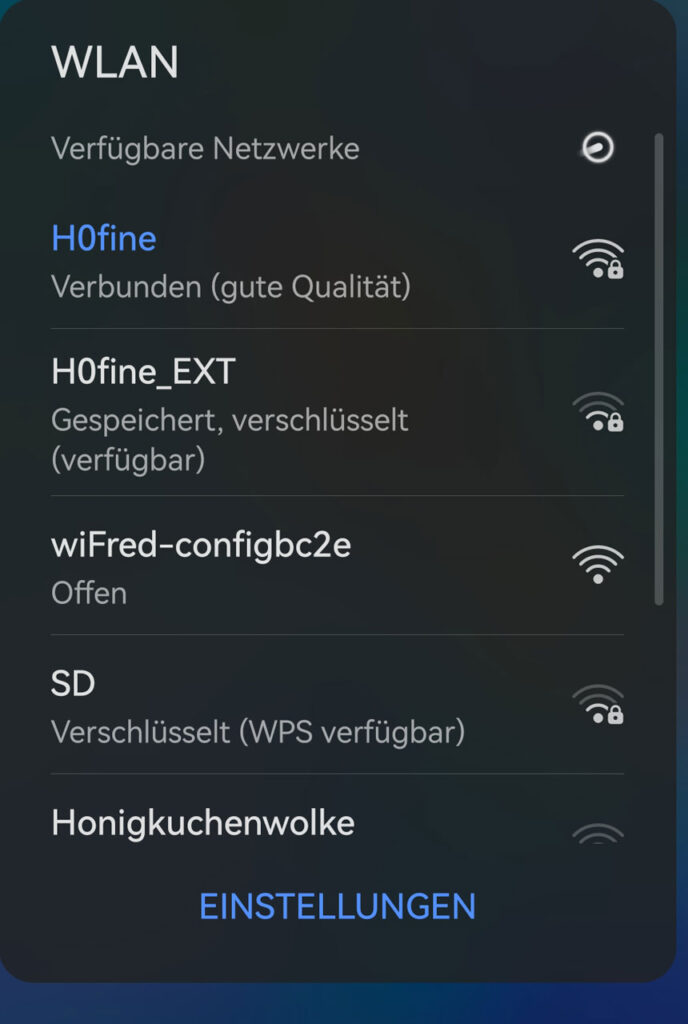
Dazu wir zunächst der WiFred ausgeschaltet (alle 4 Schieberegler runter) und etwa 5 Sekunden warten bis alle LED ausgehen. Dann die gelbe Taste gedrückt halten und dabei den WiFred mit gedrückter Taste einschalten. Die gelbe Taste gedrückt halten, bis der WiFred aufhört grün/rot zu blinken und Dauerlicht rot zeigt. Das ist das Zeichen, daß er einen Hotspot aufgebaut hat. Nun im Mobiltelefon die WLAN-Einstellungen öffnen und nach einem WLAN WiFred-configXXX suchen.
Das Mobiltelefon mit diesem WLAN WiFred-configXXXX verbinden. Eventuelle Meldungen „keine Internet verfügbar“ wegklicken.
Hierzu wäre es ganz sinvoll, wenn auf dem WiFred der Namen des eigenen WLAN stehen würde. Sonst loggt man sich versehendlich in den WiFred eines andere Mitspieles ein, der zeitgleich genau das selbe vorhat, und verursacht etwas Durcheinander.
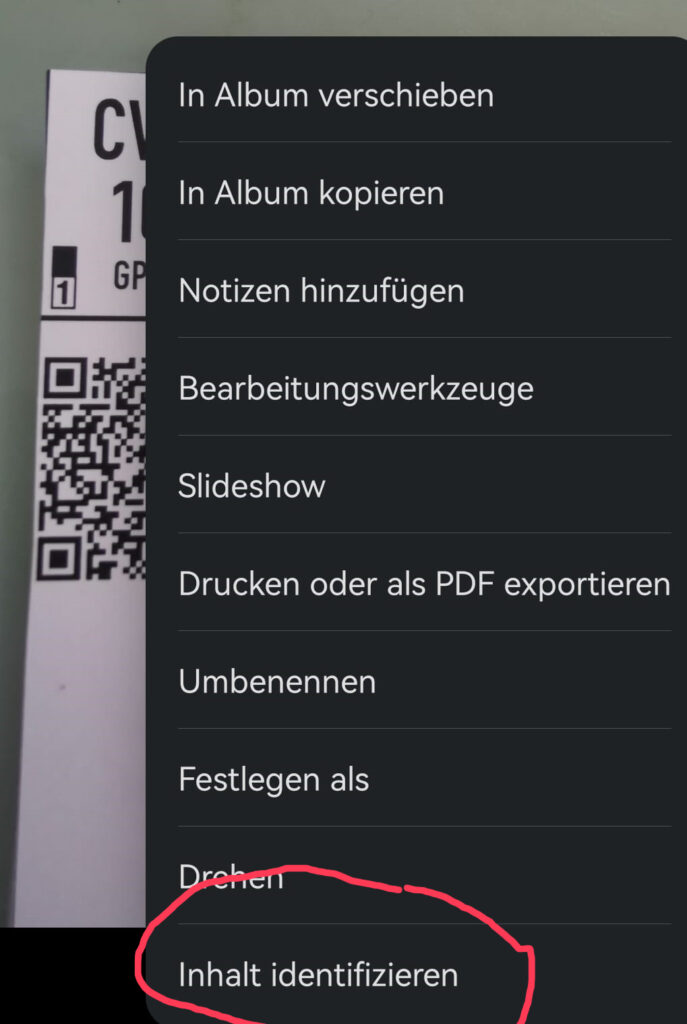
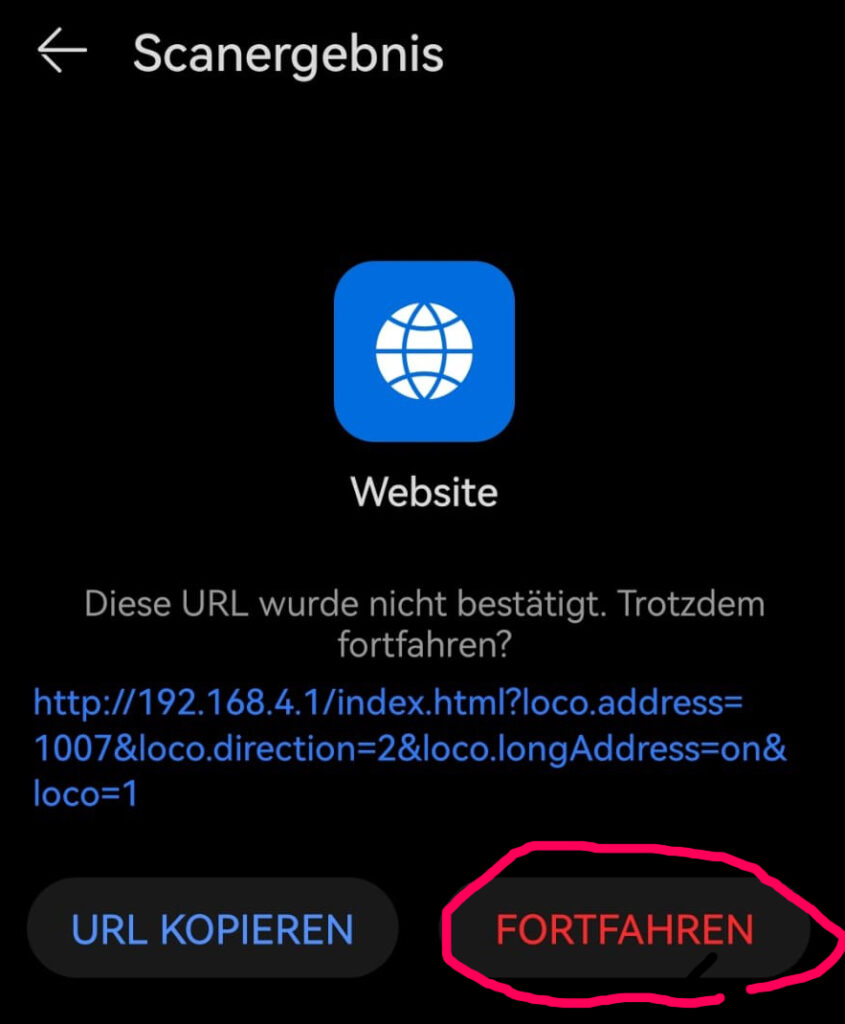
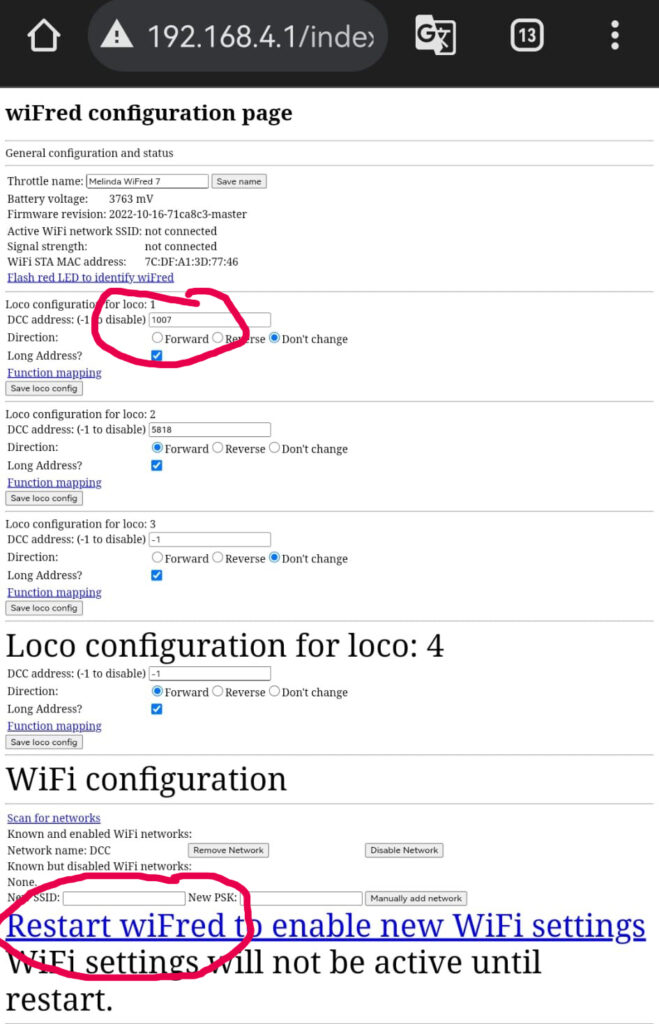
Dann mit der Foto-App den QR-Code auf der FREDI-Karte fotografieren, das Bild öffnen und die Funktion QR-Code im Bild ermitteln (auf meinem Handy im Kontextmenue unter „Inhalt identifizieren“ aufgeführt) ausführen und dann auf den angezeigten Link klicken -dieser zeigt dann die ausgefüllt Confic-Seite. Man kann das auch mehrfach machen, um z.B. den Schieberegler 2, 3 und 4 zu belegen. Die anderen Eingaben werden dabei nicht überschrieben. Dann „Restart WiFred to enable new WiFi settings„drücken, der WiFred startet neu und schon ist/sind die Adresse(n) im WiFred zugewiesen.
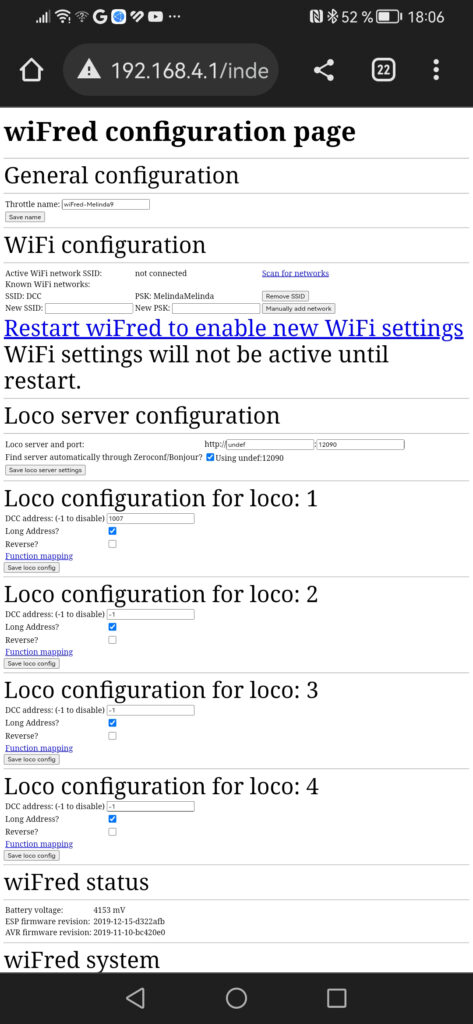
Die IP-Adresse des Wifred im Config-Modus ist immer 192.168.4.1 Hinter dem ? sind 4 Parameter angegeben – genau die die auch in der Weboberfläche stehen: loco.adress= hier steht die DCC-Adresse loco.direction=2 bedeutet „keine Änderung“, 0 = Vorwärts, 1= rückwärts loco.longAddress=on beduetet DCC-Adresse ist eine lange (4 stellige) Adresse. Für kurze Adressen entfällt die Angabe loco=1 bedeutet Schieberegler 1.
die „1234“ durch die eigenen Adresse ersetzen und in einem (kostenlosen) QR-Code Generator eingeben, die Grafik herunterladen und in die FREDI-Karte einfügen bzw. aufkleben. Bei Europäischen Fahrzeugen mit Lokkarte kann man den QR-Code auch auf die Lokkarte aufkleben.
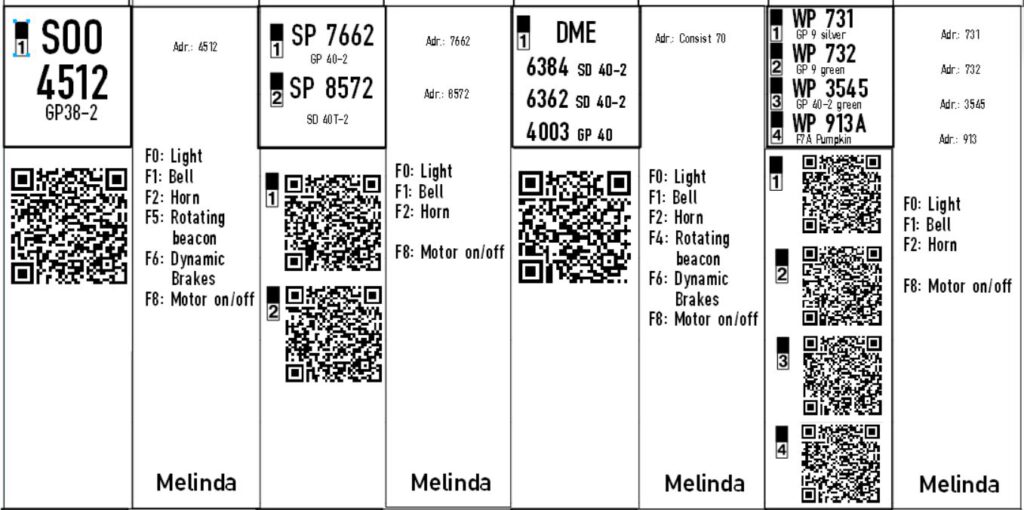
Beispiele für FREDI-Karten
Auf mneinen Karten habe ich kleine Logos für die Schiebeschalter 1-4 hinzugefügt. Meine Vorlage wird in der Mitte gefaltet und dann verklebt. Bitte bereitet FREDI-Karten für die übliche schmalen FREDI-Tasche vor (z.B. H0fine #476), also 22 mm breit und ca. 105 mm hoch (davon sind dann ca. 80 mm verdeckt, in den Bereich stehen die QR-Codes).
Beispiele für FREDI-Karten meiner US-Loks. Links eine Einzellok auf Schienberegler 1. Die beiden SP-Loks sind einzel angesteuert, wenn beide gleichzeitig fahren sollen müssen die Schieberegler 1+2 oben sein. Die 3 DME-Lok werden auf einer gemeinsamen Consist-Adresse (Schieberegler 1) gesteuert, sie können nicht einzel gefahren werden. Consist hat aber den Vorteil, daß man einstellen kann, daß nur das Horn der führende Lok aktiv ist und beispielsweise die Lichter der mittelen Lok komplett ausgeschaltet sind. Man kann es auch auf die Spitze treiben… 4 WP-Loks die in beliebiger Anzahl gefahren werden können. Zum Fotografieren der QR-Codes wird man da etwas abdecken müssen, damit es die Kamera die Codes sauber erkennt. Das geht wohl über die normale Eingabemaske sicher schneller.
So geht es schnell und einfach – Lok mit FREDI-Zettel mit QR-Code
In Waldenburg2024 war schon klar, daß wir für Waldenburg2025 einen weiteren Schattenbahnhof brauchen würden, da Muscle Shoals wohl nicht dabei sein würde.
Wir haben dann hin und her überlegt, das die beste Lösung dafür wäre. Pattonville stand zur Verfügung, aber war für unseren Wunschzuglängen doch erheblich zu kurz. Die Umsetzerei der Loks in Muscle Shoals wurde auch nicht als so ganz optimal angesehen, irgendwie ist der Loop-Yard schon ideal. Peter brachte dann die Idee eines separaten Baloontrack am Streckenende (wie bei viele FREE-MO-Arrangements zu sehen) ins Spiel. Hierbei ist jedoch die Zuglänge sehr stark eingeschränkt, da sich der gesamte Zug im Loop befinden muss, damit er auch wieder ausfahren kann.
Dann ist die Idee entstanden, Pattonville mit einem doppelten Loop zu ergänzen. Damit ist für die Zuglänge nicht der Loop selbst relevant, sondern die Nutzlänge der Gleise von Pattonville kommt noch 2x dazu. So kommen dann beachtliche Gleislängen zusammen. Ein weiteres 1,2 m-Zwischenstück zu Pattonville hab ich dann auch weder in der Scheue gefunden, in Verbindung mit dem Loop sind das dann gleich 2,4 m Nutzlänge für die beiden Loop-Gleise mehr. Da Pattonville in Summe 6 Gleise hat (wovon jeder Loop jeweils ein Ein- und ein Ausfahrgleis braucht) hat er natürlich deutlich deutlich weniger Kapazität als Loop-Yard. Die jeweils äußeren Gleise bleiben Stumpfgleis um Locals zu bilden oder Wendezüge dort abzustellen. Die sehr große Gleislänge in den zwei Loop-Gleisen ermöglicht es aber auch, zwei durchaus stattliche Züge hintereinander aufzustellen. Das muss halt vom Fahrplan her so eingeplant werden.
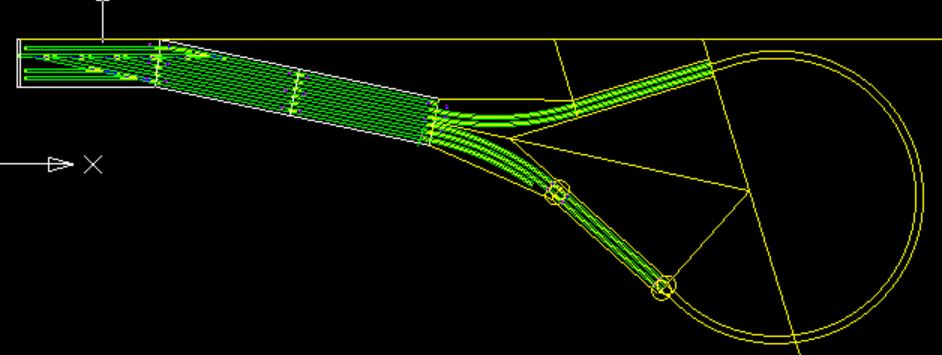
Startschuss zu Bau den Loop war dann im Mai zum Basteltreffen Diemendorf. Ich hatte vorher die Fräszeichnung erstellt, eine große Platte 10er-Pappelsperrholz geholt und noch kurz vor meinem Urlaub die CNC-Fräse angeworfen und die ersten 4 Module und die ganze Verbindungsplatten (aus 12er Multiplex) gefäst und mit ins Allgäu zum Boot einkranen genommen.
Modulbausatz wie aus der CNC gefallen.
Weil es Ende Mai/Anfang Juni dann pausenlos geregnet hat (und es auch dem Boot mega ungemütlich war) haben wir dann kurzfristig das Basteltreffen vorgezogen und bei Peter losgelegt.
Einschlagmuttern einziehenErster Testlaufbau auf dem BodenDie ersten Gleise liegen.Stand morgens am 2. Tag.
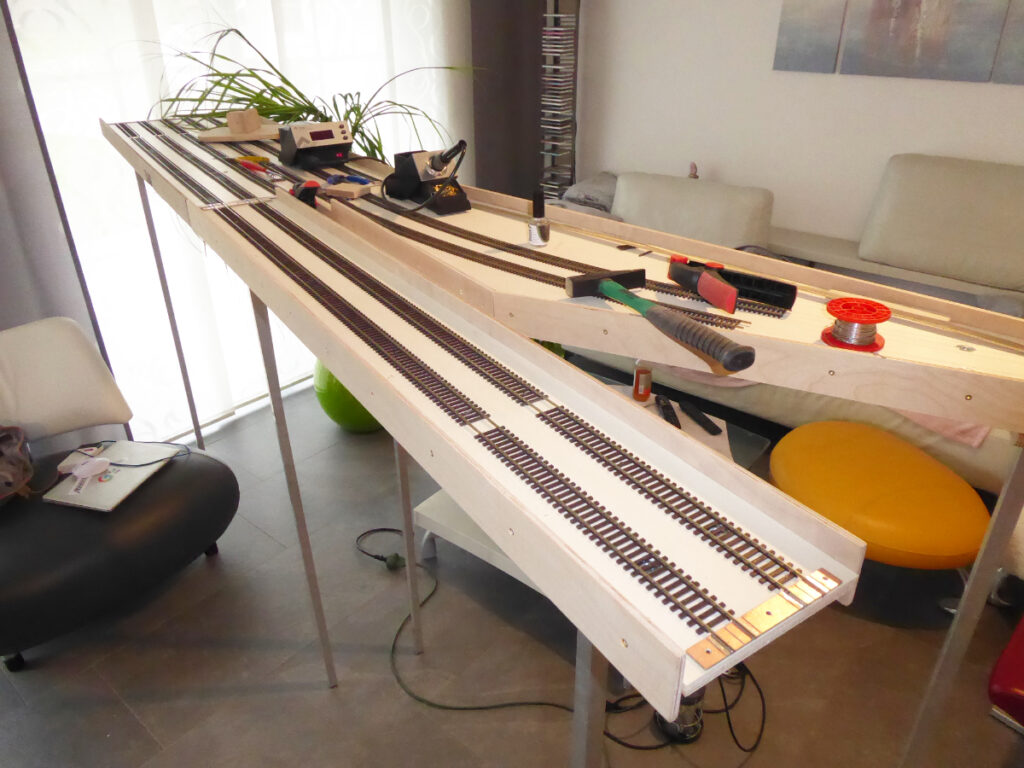
Es ging flott weiter. Als nächstes waren die geraden Streckenmodule an der Reihe. Sehr hilfreich war dabei Peters Lehre, 1,2 m lang und 16,5 mm breit. So gelingen super gerade verlegte Gleise.
Stahllehre im EinsatzDas gerade Modul ist provisorisch an der falschen Stelle angebaut.Letzter Arbeitsschritt war der Übergang zwischen den geraden Module und den Bögen herzustellenStand am Abend des 2. BautagsWohnzimmer voll
Nun wurde noch die tatsächliche Geometrie vermessen – da hat prima gepasst. So können nun die 4 Bögen dann konstruiert werden.
Leider haben wir jetzt nur noch 3 Flexgleise übrig, da reicht gerade noch für die beiden Aufstellgleise für die Locals. Zum Weiterbau des Loops müssen nun erst die 4 Bogenteile gefräst und neue Schienenprofile geliefert werden. Die Flexgleise sind bei Rails in Sheffileld bestellt, habe aber noch keinen Liefertermin.
Mit den WiFred gibt es nun im Fremo einen zuverlässigen Funk-Handregler für das LocoNet, der sich sicherlich schnell durchsetzen und in ein paar Jahren fast vollständig die kabelgebundene Fredis ablösen wird. Seit 2021 werden schon Treffen vollständig über WiFreds gefahren, ohne Rückfallebene mit LN-Boxen. ich haben inzwischen mindests 10 Treffen komplett mit Wifred gefahren, in der Spitze mit fast 50 aktiven WiFreds gleichzeitig.
Die Adresszuweisung unterscheidet sich grundlegend von Dispatch der kabelgebunden Freds. Da das Wissen hier noch nicht so weit verbreitet ist, habe ich hier diese Anleitung erstellt. Es ist ein Weg – der WiFred bietet viele Wege, aber sämtliche Option aufzuzeigen verwirrt den Einsteiger. Die ausführliche Dokumentation ist hier zu finden.
Was braucht man dafür?
Um eine Adresse auf einen WiFred zu dispatchen braucht man nur ein Mobiltelefon.
Ein WiFred kann bis zu 4 Adressen steuern
Pro WiFred können 4 Adressen (auch kurze Consistadressen) gesteuert werden, auch gleichzeitig (Beispiel: ich fahre einen Local mit zwei Loks, stelle beim rangieren eine zur Seite. Fahre dann später mit zwei Loks weiter) oder nacheinander (Beispiel: Ich habe 4 Loks (-Gruppen/Consists) für Extras dabei die ich nacheinander (nicht gleichzeitig) einsetzen möchte). Die können dann jeweils auf einen Regler zugewiesen werden, mit den 4 Schiebeschaltern kann die Steuerung der gewünschten Loks eingeschaltet werden.
Adressen dem WiFred zuweisen
Dazu wir zunächst der WiFred ausgeschaltet (alle 4 Schieberegler runter) und etwa 5 Sekunden warten bis alle LED ausgehen. Dann die gelbe Taste gedrückt halten und dabei den WiFred mit gedrückter Taste einschalten. Die gelbe Taste gedrückt halten, bis der WiFred aufhört grün/rot zu blinken und Dauerlicht rot zeigt. Das ist das Zeichen, daß er einen Hotspot aufgebaut hat. Nun im Mobiltelefon die WLAN-Einstellungen öffnen und nach einem WLAN WiFred-configXXX suchen.
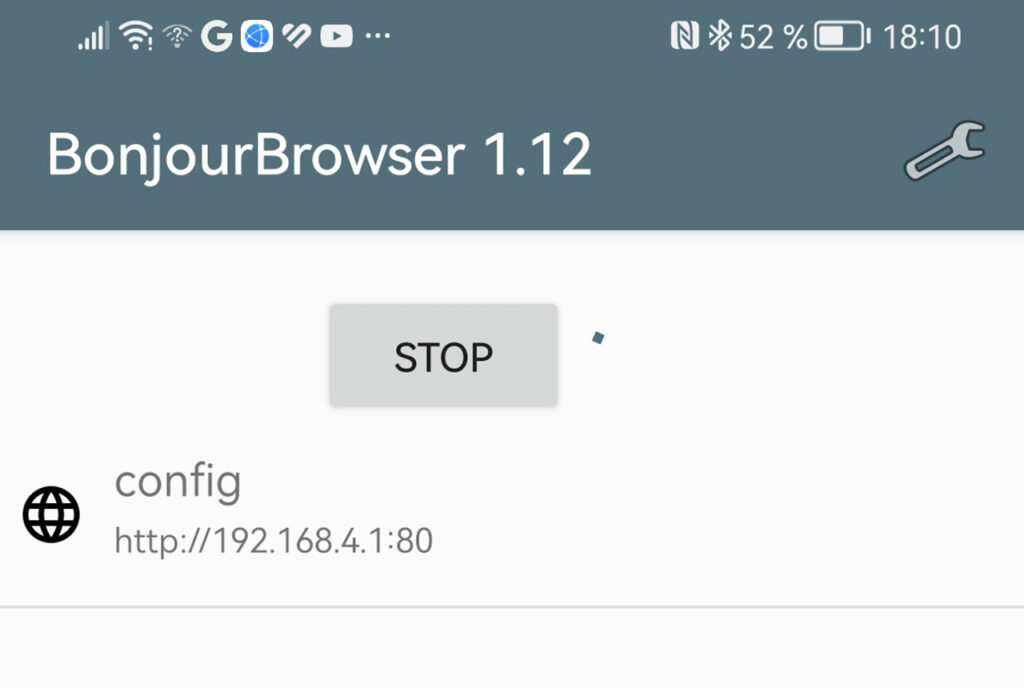
Das Mobiltelefon mit diesem WLAN WiFred-configXXXX verbinden und einen Browser öffnen. Dort kann man dann die Configseite des WiFred öffnen. Abhängig vor Betriebssystem geht das automatisch indem man auf verbinden drückt oder indem man im Bowser aufruft http://192.168.4.1 oder http://config.local aufruft. Wer es etwas komfortabler möchte sollte (zu Hause) den Bonjour Browser installieren, dieser zeigt gleich alle WiFreds an, die sich im Config befinden.
Die Configseite ist an sich selbsterklärend: Für Loco 1-4 (=Schieberegler 1-4) können lange oder kurze Consistadressen ausgewählt werden, die Fahrrichtung geänderte werden und sogar ein Funktionsmapping eingestellt werden. Adresse -1 bedeutet Schieberegler nicht belegt.
Wichtig: Jede Eingabe im Loco-Block immer mit „save loco config“ anschließen!
Sind alle Loks zugewiesen die Configseite GANZ WICHTIG immer mit dem Button „Restart WiFred to enable new WiFi settings„ VERLASSEN!!!! (auch wenn nix an den WiFi-Settings geändert wurde). Je nach Firmwarestand des WiFreds kann der Punkt „Restart“ auch unten sein.
Dann startet der WiFred neu, verbinden sich mit dem DCC-Wlan und zeigt dann grün.
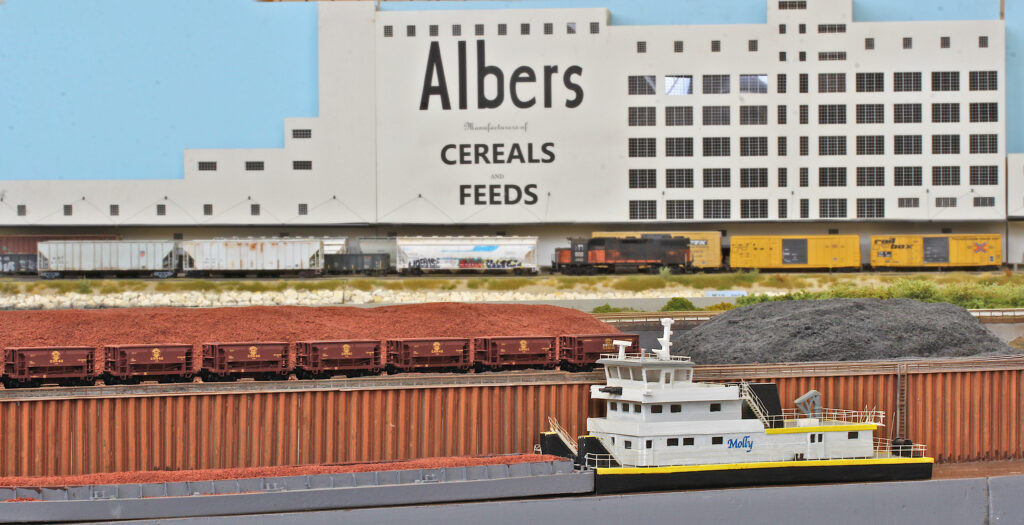
Am Anfang steht eines genialste Treffensbilder die mir je untergekommen ist! Andreas Rittershofer hatte den genialen Blickwinkel gefunden und beide Arrangements der Waldenburg-Treffens auf einem Fotos vereint: Im Vordergrund der Erzhafen von Jans Stahlwerk im AmericaN-Layout, im Hintergrund 7th-Street mit der Albers Mill des USfine-Layouts. Vielen Dank an Andreas, dass ich das Bild hier verwenden darf!
Nach längerer Abstinenz gibt es eine Neuauflage von US-fine für alle Freunde der etwas feineren US-Modellbahn in Waldenburg. Es sind neue Leute dazu gekommen, aber auch altbekannte Module wie Youngstown – mit neuem Besitzer – waren dabei.
Youngstown
USfine bedeutet nicht eine Fixierung auf Radsatznormen, es stehen vielmehr allgemeine Qualtätskriterien in Vordergrund: Gestaltete Module (bis auf den Ersteinsatz Golden State Lumber durchgehalten), hochwertiger, durchgehend gealterter Fahrzeugpark passend zur gewählten Epoche modern etwas 2005 – 2015.
Arrangement-Plan, der Rest der kleinen Halle war das AmericaN-Ranierlayout
Arrangement
Das Arrangement bestand aus dem Fiddle-Yard Pattonville, der leider etwas kürzer als sonst ausgefallen war, weil ich leider ein Teil zu Hause vergessen hatte. So wurden halt die Ausgangszüge auf 4 Gleise bereit gestellt und dann bei der Abfahrt zusammen rangiert.
Dann ging es über die Winnemucca-Curve nach Youngstown.
Dort ist in modernen Zeiten nur noch ein Anschliesser aktiv – Accampo handelt mit landwirtschaftlichem Equimpent für Ost- und Weinanbau. Die Packing Houses sind nicht mehr im Betrieb und die Shortline nutzt das Gleis zum Abstellen momentan nicht benötigter Wagen. Solche Storrage-Tracks sind heute ein netter Nebenverdienst für Shortlines und bringen den einen oder anderen Wagen bzw. Wagengattungen aufs Arrangement, für den es keinen Anschliesser gibt.
Die Packing-Houses sind in modernen Zeiten nicht mehr in Betrieb, das Gleis wird als Storrage genutzt.
Weiter ging es über die markante CCT-Brücke auf die San Louisa Line. Am dortigen Abzweig war der noch ungestaltete Neubau Golden State Lumber angeschlossen. Wie der Namen schon sagt wurde dort Lumber in Centerbeams und großvolumigen Boxcars angefahren. Die Bedienung von Youngstown und Golden State Lumber erfolgt von Classification Yard aus.
Der Bandit kommt von der Bedienung von Youngstown zurück
Nach der Louisa Line erreichte die Strecke Springfield mit dem markanten Street Running.
Zuführung der Class1-Railroad
Von Street Running zweigt der Classification Yard ab, der Betriebsmittelpunkt der Shortline.
Einfahrt Classification Yard, im Schuppen wartet der Bandit.Die SJVR 107 – die ehemalige California Northern – wartet ebenfalls auf die ankommende Wagen.
In Verlängerung zum Classification Yard liegt die 7th-Street Branch, das Streckengleis dorthin wird immer wieder als Ausziehgleis benutzt, so kommen auch die Streckenloks der Class1-Railroads beim Zustellen oder Abholen der Wagen auf die NAI35-Strecke.
Vom Classification Yard aus ziehen die Streckenloks auf die 7th-Street Branch aus.
Den Anschluß der NAI35-Strecke bildet 7th-Street mit der markanten Albers Mill.
Albers Mill7th Street
Am Streckenende liegt Central Valley Chemicals mit der Tankwagenentladung am Streckengleis.
Central Valley Chemicals
In 7th-Street hat der lokal Schrotthändler Steel Smith den ehemaligen Pier angemietet und schlägt dort mit einem Bagger Schrott aus Abrollmulden in Gondolas um. Die Absetzer-LKW bringen dauern Nachschub, und so werden mindestens 3 Gondolas am Tag beladen.
Steel Smith schlägt Schrott am ehemaligen Pier um.Steel Smith ist froh, endlich ein Gleis anmieten zu können. Der Schrott wird mit Absetzmulden herangeschafft.
Neben dem Anschluß von Henry&Sohns geht es geradeaus am Street-Running nach Springfield Industries. Die dortigen Anschlüsse (ACME und Springfield Distribution) bekommen regelmäßig mehr Wagen als die Anschlußgleise fassen können. So muss ein Reefer bei ACME gleich Morgen zugestellt und zur Mittagszeit schon wieder abgeholt und eine neue Leerwagen dafür zugestellt werden. Auch bei Sunrise Distribution müssen untertags Wagen getauscht werden.
Der Grashüpfer rangiert in Springfield Industries.
Betrieb Neu – bzw. bislang nur im Privattreffen im Bw Kornwestheim erprobt – war die Konzentration auf überwiegenden Branchline-Rangierbetrieb. Ziel war: Gepflegtes rangieren (bis der Arzt kommt) mit hochwertigem, durchgehend gealtertem, epochengerechtem Fahrzeugpark. Hier gab es fast nur Rangierjobs auf der Branch – genau die Jobs die bei der SWD immer so heiß begeht sind. Die örtliche Class1-Railroad hat die Zustellung der letzten Meile eine neu gegründeten Shortline überlassen (die aktuell einen wild zusammen gewürfelten Lokpark betreibt – Hauptsache fährt und bremst..). Die Zuführung der Class1-Railroad erfolgt vom Fiddle-Yard Pattonville zum Springfield Classification Yard. Dort macht sich die Shortline an die Zerlegung der Zugs und rangiert die einzelnen Rangierjobs zusammen.
Action im Classification Yard! Zwei Rangierloks zerlegen die ankommenden Wagen für die drei Rangierjobs.Die UP fährt Light Power nun zurück nach PattonvilleLight Power auf der CCT-Brücke vor Youngstown
Dann starten die Locals nach Youngstown, 7th-Street und zu den Anschlüssen am Springfield Industrie. Wurden allen Anschlüsse bedient und die abgehenden Wagen zusammen rangiert geht es zurück nach Springfield Classification Yard.
Rangieren in 7th Street
Dort steht nochmals die Sortierung der Wagen nach Richtungen an bevor dann der geblockte Übergabezug nach Pattonville startet.
Der Arbeitstag bei der Branchline ist fast geschafft: Der Bandit hat sich auf das Nebengleis verzogen während die UP die Wagen für die Ampelfarben abholt. Im Hintergrund wartet schon die NS mit den Wagen für die „dunklen“ Farben.
Wir haben dann während des Betriebs schnell gemerkt, daß es sinnvoller ist, die Zuführung in zwei Züge zu teilen. Dann konnte die Rangiercrew schon mit der Zerlegung beginnen. Eine Zustellung erfolgte dann von einer westlichen Class1-Railroad, die andere von einer eher im Osten angesiedelten. Natürlich waren die Wagen aber nicht nach Zielen geblockt – sonst wäre es im Classification Yard ja zu einfach gewesen.
Die UP holt sich die Wagen für die Apfelfarben im Yard ab.Ist die UP mit dem Apfelfarben weg gibt es etwas Platz im Yard. Die NS holt mit Unterstützung einer KGS die Wagen für die dunklen Farben ab.
Nur H0fine-Fahrzeuge? Nein, es gab keinen dogmatischen Ansatz. Natürlich sind Code88-Radsätze bei Wagen (wo man die Radsätze offenen sehen kann) gerne gesehen, aber kein Muss. Nachdem Reboxx nicht mehr am Markt ist, sind diese inzwischen schwer zu bekommen. Einzeln Anbieter wie z.B. Exactrail bieter zwar solche an, nur passen die von der Achslänge her nicht Mal zu den eigenen Wagen. Manche Radsätze lassen sich schmäler drehen, aber nicht jeder hat Zugang zu einer Uhrmacherdrehmaschine. Bei Loks sind die Radsätze nicht so im Focus und werden in der Regeln nicht umgebaut – was ja auch Kosten spart.
Der Grashüpfer wartet neben der Einfahrt zum Yard.
Bei den Kupplungen sind nur Plastikkupplungen auf dem Index, Kadee 83 ohne den unsäglichen Vorentkupplungsbügel sind bei einem Großteil der Wagen im Einsatz, bei wenigen auch noch die No5. Die kleineren, fast maßstäblichen Kupplungen erfordern jedoch einen saubere Höhenjustierung (da hab ich mir selber die eine oder andere Schadwagenkarte geschrieben) und offenbaren bei langen Wagen so manchen Gleisbaufehler. In Summe ist jedoch ein zuverlässiger Rangierbetrieb damit möglich.
DCC Natürlich wurden wieder keine LN-Boxen mehr aufgebaut, sondern nur mit WiFreds gefahren. Es ist schon beeindruckend wie schnell aufgebaut und betriebssicher das DCC ist, wenn man nur 3 lange LN-Kabel zwischen der Zentrale und den Booster gezogen werden müssen. Das spart massiv Zeit beim Aufbau und durch den quasi kompletten Entfall von Störungen durch die nicht vorhandenen vielen Streckverbinungen.
Ich habe die das neue Uhlenbrock LN-WiFi Interface 63860 ausprobiert, aber das war leider noch nicht tauglich. Da ist noch ein Software Update nötig. Daher wurde dann schnell wieder auf PC mit jmri und USB-LN-Interface gewechselt und damit störungsfrei das Treffen gefahren.
Fazitund Fortsetzung? Das Betriebskonzept hatten wir ja schon im sehr kleinen Kreis im Herbst ein Privattreffen im Bw Kornwestheim durchgeführt, es hat aber auch allen, die bei der Art von Treffen nun zum ersten Mal dabei waren sehr viel Spaß gemacht hast. Fortsetzung im Jannuar 2024 – dann wahrscheinlich sogar in der großen Halle in Waldenburg ist fest eingeplant.
Nochmal der Yard mit der SD 60M der NS
Andreas Rittershofer hat das Treffen mit seiner Kamera besucht, seine Bilder sind auf Kleinbahnwiki zu finden.
Bilder? Meine Bilder habe ich zum ersten Mal mit einen Lumix GX-80 mit Focus Stacking erstellt. Die Kamera erstellt in Form eines 4K-Films ein kurzes Video mit allen fokussierbare Schärfeebenen. Das Bild muss dann in Einzelbilder zerlegt werden (mit ffmgp) und dann mit einer entsprechenden Bildbearbeitungssoftware (Affinity 2) eine Bild aus allen Ebenen, die scharf abgebildet sind, erstellt. Für mich war es der erste Versuch, sicher noch nicht perfekt aber doch recht beindrucken. Vor allem wenn man bedenkt, dass alle Bilder aus der Hand ohne Stativ entstanden sind. Bei den Lichtverhältnissen in der Halle bedeutet dies ständig offene Blende und ISO 1250.
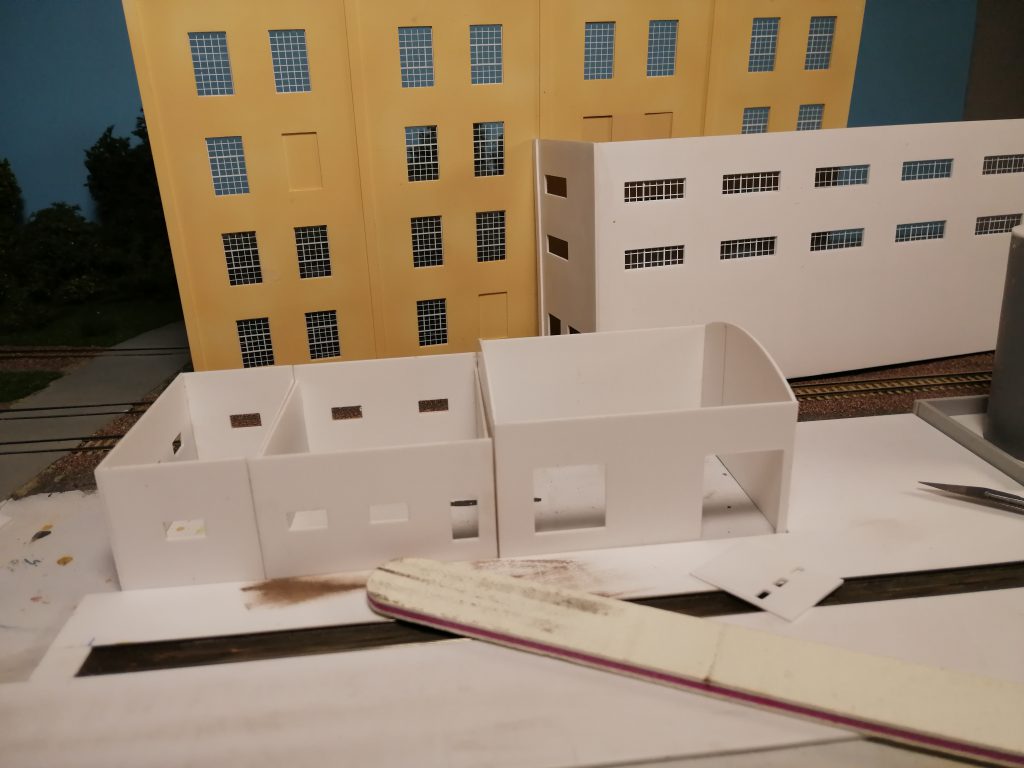
Vorbildgebäude sind – vor allem in den USA – imposant groß, eine Lokomotive wirkt winzig davor. Genau so sollte die Hintergrundgebäude für das Twin-Cities-Prjekt – das inzwischen den Namen Meliwatha bekommen hat – werden. Da war auf jeden Fall Eigenbau angesagt. Die Inspiration lieferte das entsprechende Gebäude im MNNR Industriegebiet.
Das gelbe Produktions- und Lagergebäude sowie der Rohbau des Wate-Oil-Dealers
So ein Gebäude braucht Fenster, viele Fenster und filigran sollen die auch sein. Also wurde ein Aetzfilm erstellt.
Massenhaft Fenster, schon weiss lackiert.
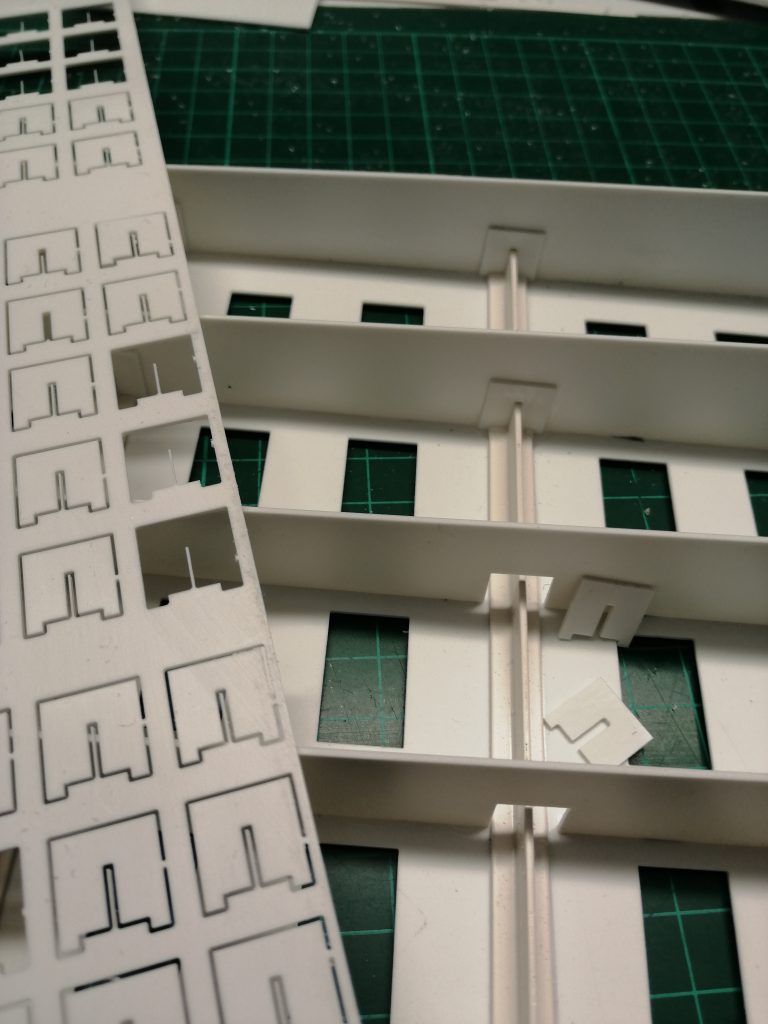
Für die Fassade wurde auf die CNC-Fraese zurückgegriffen. Anders sind so viele Fensterausschnitte ich genau und sauber in einer Flucht hinzubekommen.
Die Fräse hat fleissig Fensteröffnungen gefraest, die Fassade entstand aus 1 mm Polystyrol.
Um die doch recht dünne Fassade zu stabilisieren wurde aus Kunststoff-Profilen eine Stützkonstruktion erstellt.
8 mm T-Profile stützen die Fassade.L-Profile bilden den Abschluss nach unten und zu den Stirnseiten.
Um später das Gebäude selektiv beleuchten zu können wurden Etagenboeden eingebaut.
Da die genaue Anpassung an die T-Profile doch sehr aufwendig geworden wäre, wurden kleine Passstücke gefräst, die das Gebäude weiter stabilisieren und die Lichtausbreitung ins nächste Geschoss verhindern.
Nun müssten die vielen Fenster eingebaut werden.
Die Fenster wurden mit dem umlaufenden Rand in der Fensteröffnungen platziert und dann mit der ganz feinen Kanüle vorsichtig sehr sparsam mit Sekundenkleber verklebt.
Die Verglasung erfolgte mit hauchdünnen Mikroskop-Deckglaesern.
Der mittlere Teil des Produktionsgebäudes auf der Convention in Rodgau.
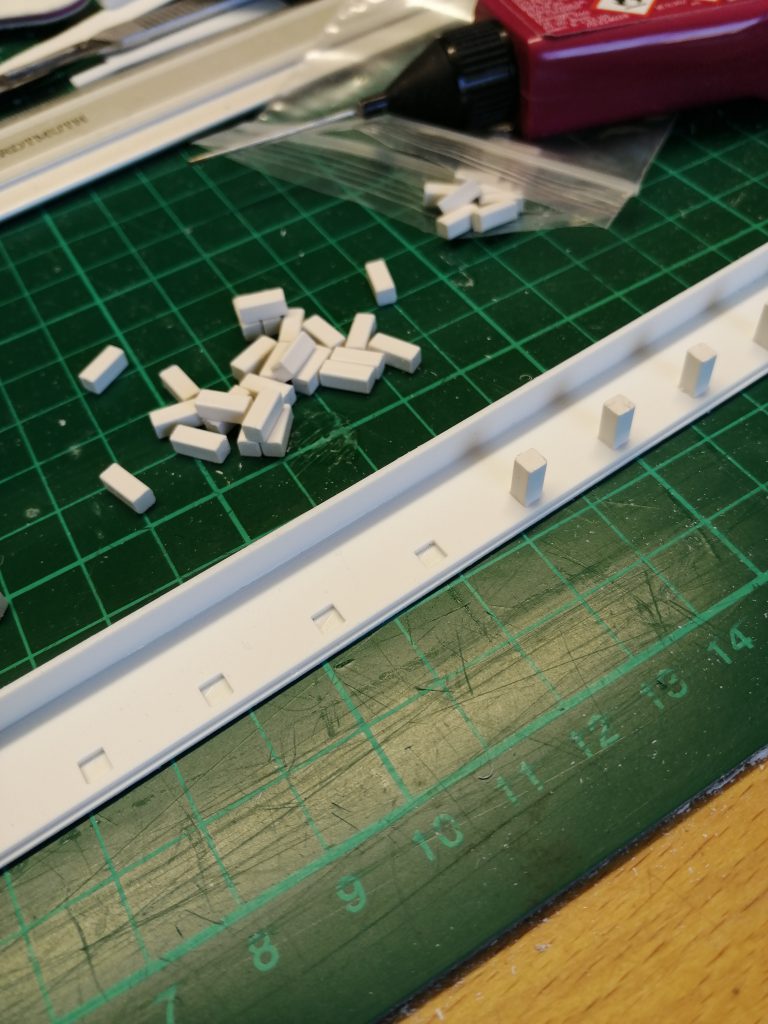
Für die Rampen am Lagergebäude wurden rechteckige Aussparung ausgefräst, so bekommen die Stützen mehr Halt und sind schön gleichmäßig positioniert.
So wird es stabil und gleichmäßig.Das Lagergebäude auf der Convention in Rodgau.